








測區位于華東某海灘,呈南北走向,地質以沙石、泥土為主,面積約13平方公里。該區域氣候濕潤,風速約3-4級,每日漲潮退潮時間不定。客戶要求項目數字正射影像(DOM)精度優于0.5m,且數字高程模型(DEM)精度在10cm以內。
位于潮間帶的灘涂由于巖土結構特殊性,海灘漲潮退潮時間有限,使得人工測量和無人船/有人船測量都難以應付。當低平潮發生后,海灘裸露時間較短,費時又費力的人工測量難以在短時間內快速、準確獲取地形數據,且人員危險性較高。當高平潮發生后,水深很淺,且海灘浪較大,漲退潮也很快,船體容易擱淺,無人船/有人船測量無法正常作業。
項目采用PM-1500機載激光測量系統進行沿岸和灘涂測量。該系統以蜂虎垂直起降固定翼無人機作為平臺,擁有測程長、精度高、續航長、保障全等優勢,可以在大范圍內快速、準確、連續地獲取高精度的地形數據。

▲PM-1500機載激光測量系統和蜂虎垂直起降固定翼無人機
系統優勢:
?測程長:激光雷達最遠測距1650m。
?精度高:200萬點/秒高點頻,7次回波。
?續航長:無人機載荷作業可達120min。
?保障全:無憂保障包,多重守護更省心。
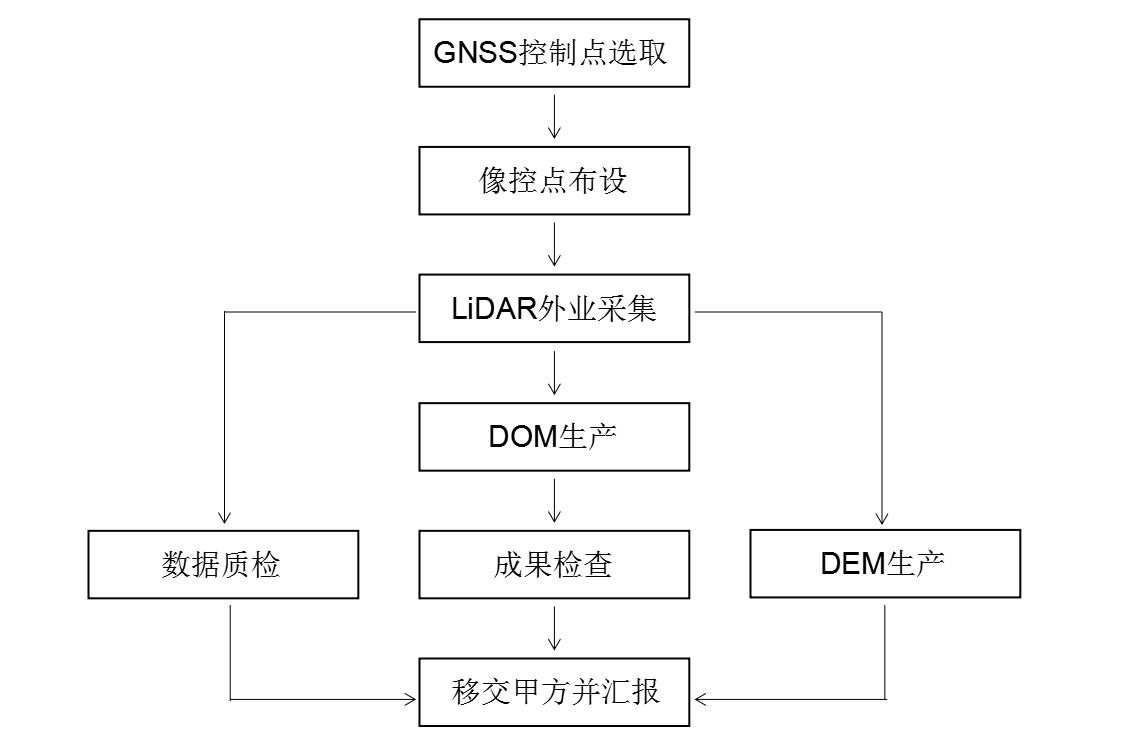
▲項目實施總體技術路線
航線規劃
為保證激光點云精度滿足成果要求,本次飛行按200m相對航高沿著道路進行航飛采集,飛機地速72km/h,航向重疊度75%,航線間隔89m。
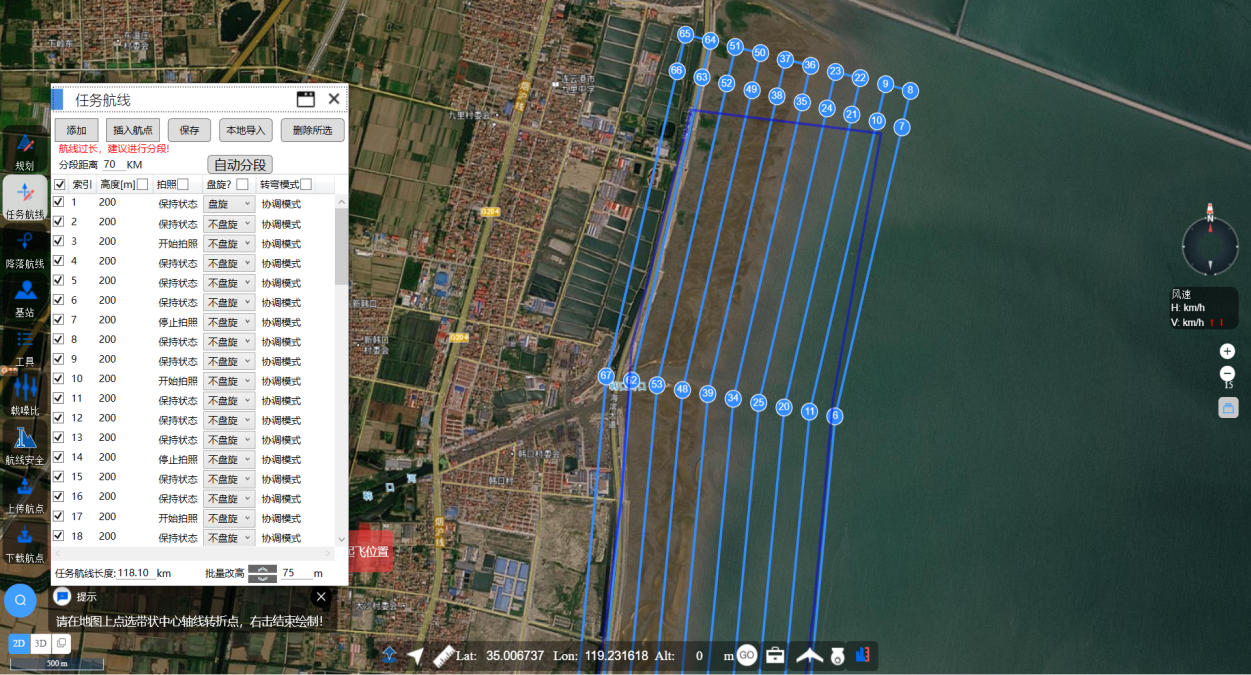
▲航線規劃界面圖
2.數據采集
結合當地的潮汐變化表和現場綜合評估情況,作業人員選擇中午12時進行作業,這樣既保證潮水在相對最低點,也能保證充足的光照度,以避免過大的陰影。

▲飛行現場
3.內業處理
外業采集結束后,作業人員把激光原始點云數據、GNSS數據、IMU數據導入到中海達數據融合軟件進行后差分處理,解算得到高精度的POS數據和LAS點云數據。基于這些數據,作業人員可以生成數字正射影像和數字高程模型。
4.精度驗證
作業人員通過將激光點云與區域內的驗證點進行比對,點云數據高程中誤差為7.7cm,滿足精度優于10cm的需求。

▲精度驗證
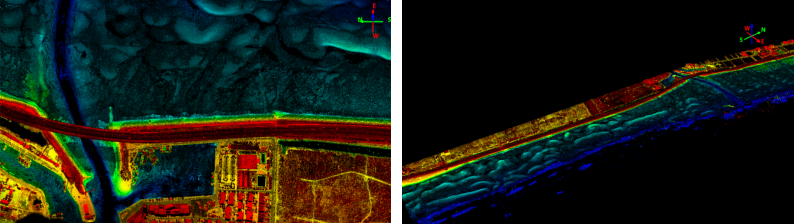
▲點云數據
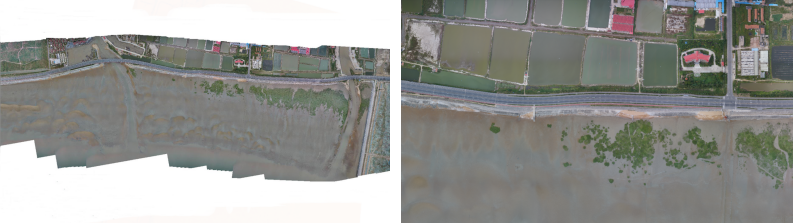
▲數字正射影像
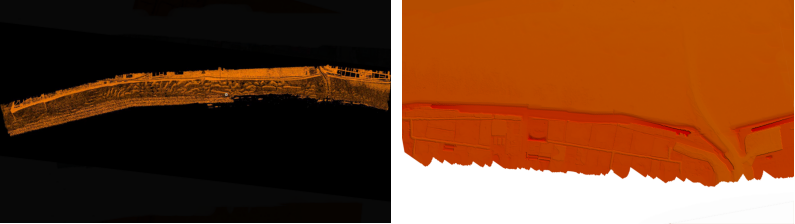
▲分類后地面點 ▲數字高程模型
通過應用,利用機載激光雷達技術進行灘涂地形測量具有以下兩大優勢。
一是精度和效率高。PM-1500機載激光測量系統通過搭載蜂虎垂直起降固定翼無人機平臺,在200m左右相對航高條件下,灘涂點云高程中誤差為7.7cm,滿足精度優于10cm的要求。同時,與人工測量相比,采集效率高、內業處理快的PM-1500機載激光測量系統的綜合人均效率提升10倍。
二是適應性強。受海灘漲潮退潮的影響,地面測量人員難以施測,無人船/有人船也無法進入潮間帶實施測量。而機載激光雷達技術則可以不受作業環境限制,大大方便了灘涂地形測量工作的開展。
基于上述優勢,機載激光雷達技術有效解決了“車下不去,船上不來,人不安全”的測量難題,為獲取灘涂地形數據提供了可靠、精準、高效的解決方案。
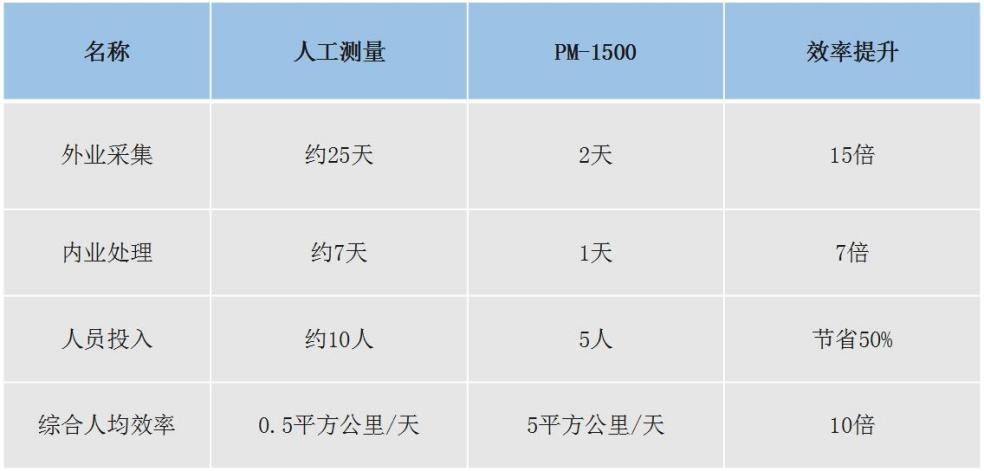
▲PM-1500機載激光測量系統與人工測量效率對比






 頂部
頂部