該方案采用了“空天地一體â€ç›£æ¸¬æŠ€è¡“���,水上采用無人機æ載PM-1500機載激光測é‡ç³»çµ±���,水下采用iBoat BS12水文測驗無人船����,進行水下水下一體化測é‡�,
å¯å¿«é€Ÿç²å–水上水下一體化地形數據,真實åæ˜ ç¾å¯¦å ´æ™¯åœ°å½¢åœ°è²Œæƒ…æ³ï¼Œæˆæžœå¤šæ¨£åŒ–,å¯æ»¿è¶³ç•¶å‰å¤šæºæ•¸æ“šèžåˆéœ€æ±‚�����,å¯å»£æ³›æ‡‰ç”¨äºŽæ°´åˆ©����ã€äº¤é€š����ã€åœ°è³ªç‰æ¸¬ç¹ªä»»å‹™ã€‚
方案主è¦è¨å‚™ï¼š


方案作æ¥éŽç¨‹ï¼š
1. å‰æœŸé€²è¡Œé …ç›®èª¿ç ”èˆ‡éœ€æ±‚åˆ†æž
å°æ¸¬é‡å€åŸŸé€²è¡Œè©³ç´°çš„èª¿ç ”���,了解水域的地ç†ç‰¹å¾ã€æ¸¬é‡èŒƒåœ��ã€æ°´ä¸‹åœ°è²Œç‰ä¿¡æ¯��;明確測é‡ç›®æ¨™��ï¼Œå¹¶æ ¹æ“šé …ç›®å…·é«”éœ€æ±‚ï¼Œæ˜Žç¢ºæ¸¬é‡ç²¾åº¦��ã€èŒƒåœç‰����。

1. 測é‡å¯¦æ–½
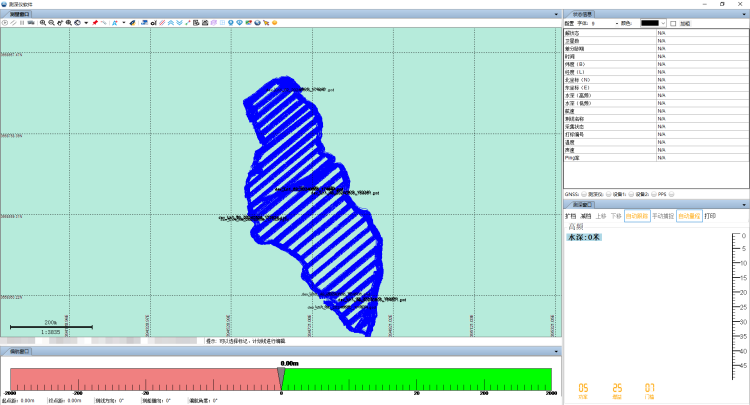
1ï¼‰åœ¨é …ç›®ç¾å ´é€²è¡Œè¸å‹˜ï¼Œç¢ºå®šæ¸¬é‡è·¯ç·šç‰��;將PM-1500機載激光測é‡ç³»çµ±å®‰è£åˆ°ç„¡äººæ©Ÿä¸Š���,并進行è¨å‚™èª¿è©¦�。
2)按照é 定的測é‡è·¯å¾‘å’Œåƒæ•¸è¨ç½®ï¼Œå•Ÿå‹•æ¸¬é‡è¨å‚™é€²è¡Œæ•¸æ“šé‡‡é›†���,并密切關注è¨å‚™çš„é‹è¡Œç‹€æ…‹å’Œæ•¸æ“šè³ªé‡�。在數據采集完æˆåŽ�����,å°æ•¸æ“šé€²è¡Œè³ªé‡æª¢æŸ¥���。
2. 數據處ç†èˆ‡åˆ†æž
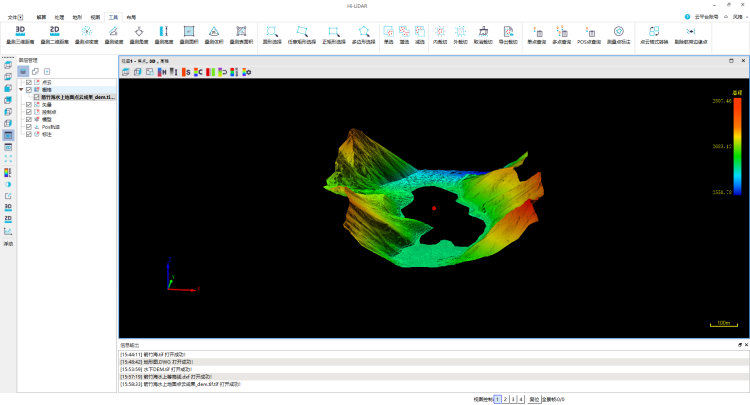
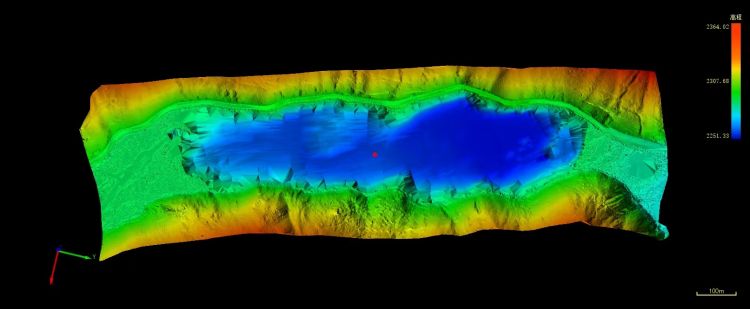
1)é…套Hi-LiDAR點云處ç†è»Ÿä»¶ï¼Œå°‡PM-1500機載激光測é‡ç³»çµ±é‡‡é›†çš„激光點云基礎數據����,通éŽåŽè™•ç†å¾—到地é¢é»žåŽè¼¸å‡ºæ¸¬å€æ°´ä¸Šé«˜ç¨‹æ¨¡åž‹ï¼ˆDEM)���。
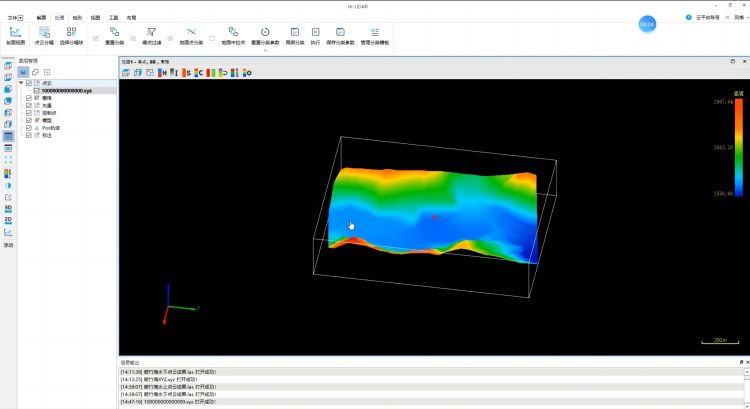
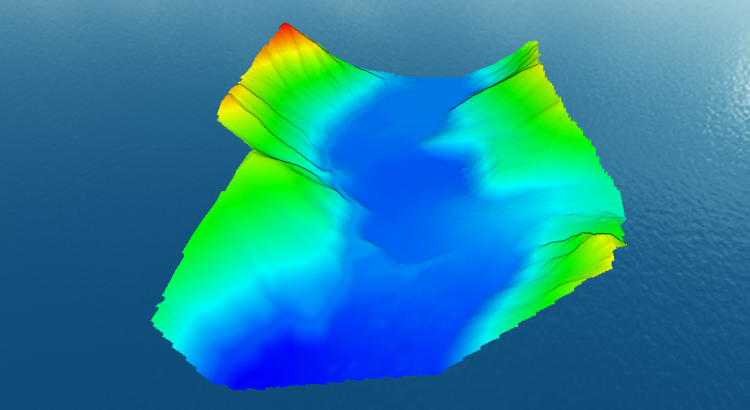
2)使用iBoat BS12水文測驗無人船采集水下地形基礎數據��,通éŽHiMAXåŽè™•ç†è»Ÿä»¶è¼¸å‡ºæ°´ä¸‹åœ°å½¢é«˜ç¨‹æ¨¡åž‹(DEM)。
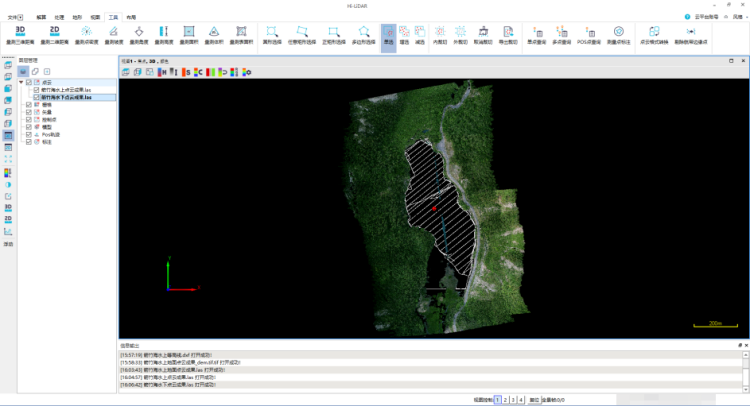
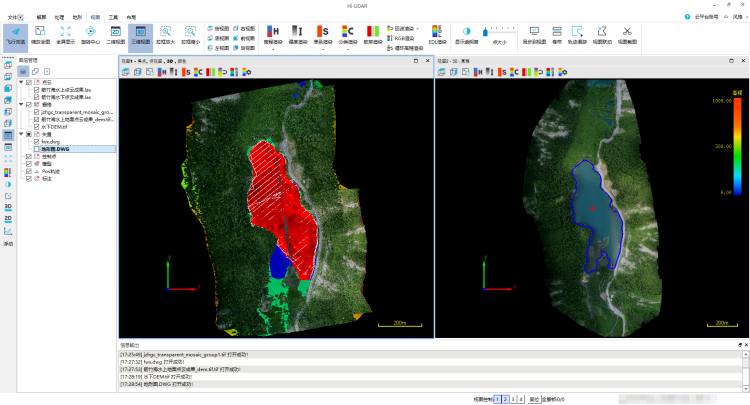
3)利用Hi-LiDAR多æºæ•¸æ“šå¯è¦–化管ç†å·¥å…·����,å°æˆæžœæ•¸æ“šé€²è¡Œèžåˆ��ã€ç–ŠåŠ ,從水上水下整體視角����ã€å¤šæºæ•¸æ“šç–ŠåŠ 分æž����。























 é ‚éƒ¨
é ‚éƒ¨